分析无杆气缸与伺服电动缸之间有什么区别
阅读次数:1700
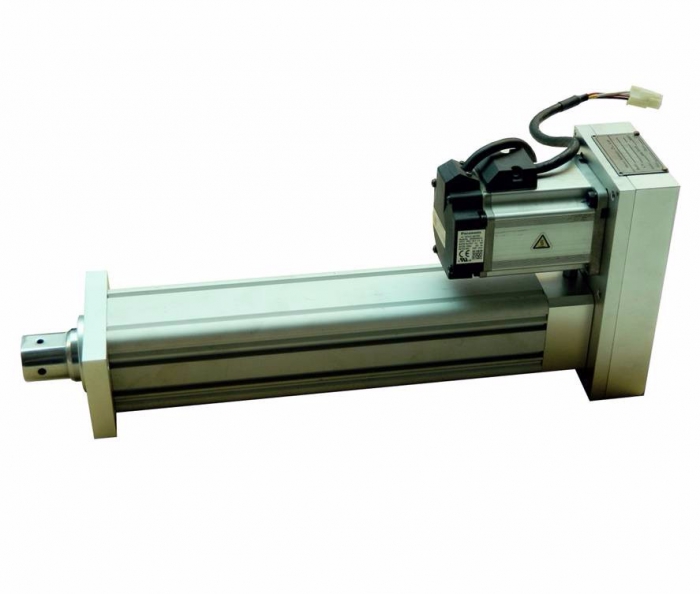
二者技能功能的比较:个别而言,比较伺服电动缸,无杆气缸可在恶劣前提下坚固地作业,且操作简单,基本可实现免维护。无杆气缸拿手作往复直线活动,尤其适于产业主动化中很多的传递请求——工件的直线转移。并且,仅仅调节装置在无杆气缸两边的单向节流阀就可简单地实现平稳的速度把持,伺服电动缸也成为无杆气缸驱动体系较大的特点跟上风。所以对于未几点定位请求的用户,绝大多数从应用便利性视点更偏向于应用无杆气缸。当初产业现场应用电动履行器的应用大局部都是请求高精度多点定位,这是因为用无杆气缸难以实现,退而求其次的结果。高速伺服电动缸而电动履行器重要用于旋转与摇摆工况。其上风在于响应时刻快,经过反馈体系对速度、位置及力矩进行正确把持。但当须要完结直线活动时,须要经过齿形带或丝杆等机械装置进行传动转化,因此结构绝对较为庞杂,并且对作业环境及操作维护人员的专业常识都有较高请求。无杆气缸的上风在于:
(1)适应性强。精巧伺服电动缸可能在高平跟低温环境中畸形作业且存在防尘、防水才干,可适应各种恶劣的环境。而伺服电动缸因为存在大量电气部件的缘故,对环境的请求较高,适应性较差。
(2)输出力大。无杆气缸的输出力与缸径的平方成正比;而伺服电动缸的输出力与三个因素有关,缸径、电机的功率跟丝杆的螺距,缸径及功率越大、螺距越小则输出力越大。一个缸径为50mm的无杆气缸,实际上的输出力可达2000N,对于雷同缸径的伺服电动缸,多自由度平台只管不同公司的产品各有差别,然而基本上都不超过1000N。明白明了,在输出力方面无杆气缸更具上风。
(3)对应用者的请求较低。无杆气缸的原理及结构简单,易于装置维护,对于应用者的请求不高。伺服电动缸则不同,工程人员必须存在须要的电气常识,不然极有或者因为误操作而使之破坏。伺服电动缸的上风重要体当初以下3个方面:
(1)体系形成十分简单。因为电机通常与缸体集成在一起,再加上把持器与电缆,伺服电动缸的全部体系就是由这三局部组成的,简单而紧凑。
(2)柔韧性强。直线模组几种叫法,线性模组、直角坐标机器人、直线滑台等,是继直线导轨、直线运动模组、滚珠丝杆直线传动机构的自动化升级单元。可以通过各个单元的组合实现负载的直线、曲线运动,是轻负载的自动化更加灵活、定位更加精准。换枪盘高性能工业机器人系统的主要组成部分。 它可以使机器人充分发挥其功能,完成各种操作,并提高机器人的成本效益。毫无疑难,伺服电动缸的柔韧性远远强于无杆气缸。伺服电动缸厂家因为把持器可能与PLC直接进行连接,对电机的转速、定位跟正回转都可能实现正确把持,在水平上,伺服电动缸可能依据须要随便进行活动;因为气体的可紧缩性跟活动时产生的惯性,即便换向阀与磁性开关之间配合地再好也不能做到无杆气缸的准判断位,柔韧性也就无从谈起了.
(3)中断的位置数多且把持精度高。换枪盘高性能工业机器人系统的主要组成部分。 它可以使机器人充分发挥其功能,完成各种操作,并提高机器人的成本效益。个别伺服电动缸有低端之分,低端产品的中断位置有3、5、16、64个等,依据公司不同而有所转变;产品则更是可能达到多少百甚至上千个位置。在精度方面,伺服电动缸也存在的上风,定位精度可达±0.05mm,所以经常应用于电子、半导体等精巧的职业。
上一篇:
伺服电动缸触碰限位怎么恢复呢?要注意什么?
下一篇:
伺服电动缸的定位及用途
相关新闻
{kind=link}