平行抓手
阅读次数:3150
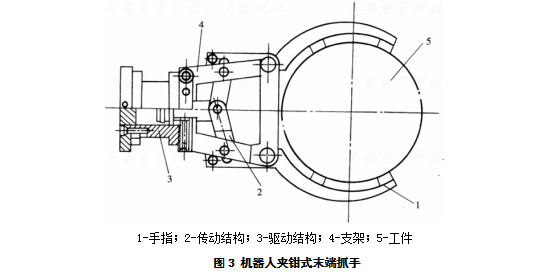
1、夹钳式末端抓手
也称为夹钳式取料手,是工业机器人较常用的一种末端执行器形式,在装配流水线上用得较为广泛。它一般由手指(手爪)驱动机构、传动机构、连接与支承元件组成,工作原理类似于常用的手钳。夹钳式末端执行器能用手爪的开闭动作实现对物体的夹持,如图3所示。
(1)手指类型
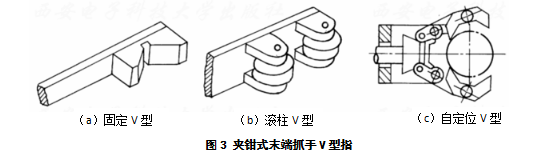
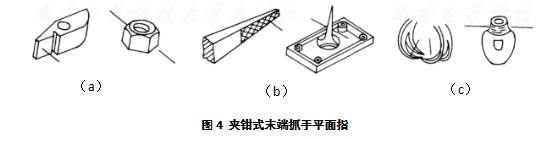
手指是直接与工件接触的部件。手部松开和夹紧工件,就是通过手指的张开与闭合来实现的。机器人的手部一般有两个手指,也有三个或多个手指,其结构形式常取决于被夹持工件的形状和特性。指端的形状通常有两类: V型指和平面指,V型指用于夹持圆柱形工件,如图3所示,平面指一般用于夹持方形(具有两个平行平面)工件、板形或细小棒料,如图4所示。另外,尖指和薄、长指一般用于夹持小型或柔性工件。其中,薄指一般用于夹持位于狭窄工作场地的细小工件,以避免和周围障碍物相碰,长指一般用于夹持炽热的工件,以免热辐射对手部传动机构的影响。
指面的形状常有光滑指面、齿形指面和柔性指面等。光滑指面平整光滑,用来夹持已加工表面,避免已加工表面受损。齿形指面的指面刻有齿纹,可增加夹持工件的磨擦力,以确保夹紧牢靠,多用来夹持表面粗糙的毛坯或半成品。柔性指面内镶橡胶、泡沫、石棉等物,有增加磨擦力、保护工件表面、隔热等作用,一般用于夹持已加工表面、炽热件,也适于夹持薄壁件和脆性工件。
(2)传动结构
传动装置是向手指传递运动和动力,以实现夹紧和松开动作的装置。该装置根据手指开合的动作特点分为回转型和平移型。回转型又分为一支点回转和多支点回转。根据手爪夹紧是摆动还是平动,又可分为摆动回转型和平动回转型。
①回转型传动装置。夹钳式手部中回转型较多,其手指就是一对(或几对)杠杆,一般同斜楔、滑槽、连杆、齿轮、蜗轮蜗杆或螺杆等机构组成复合式杠杆传动机构,用以改变传力比、传动比及运动方向等。
 ②平移型传动装置。平移型夹钳式手部是通过手指的指面作直线往复运动或平面移动来实现张开或闭合动作的, 常用于夹持具有平行平面的工件(如冰箱等)。 其结构较复杂,不如回转型手部应用广泛。直线往复移动装置:实现直线往复移动的机构很多, 常用的斜楔传动、齿条传动、螺旋传动等均可应用于手部结构,它们既可是双指型的, 也可是三指(或多指)型的;既可自动定心, 也可非自动定心;平面平行移动装置:都采用平行四边形的铰链机构—双曲柄铰链四连杆机构, 以实现手指平移。
②平移型传动装置。平移型夹钳式手部是通过手指的指面作直线往复运动或平面移动来实现张开或闭合动作的, 常用于夹持具有平行平面的工件(如冰箱等)。 其结构较复杂,不如回转型手部应用广泛。直线往复移动装置:实现直线往复移动的机构很多, 常用的斜楔传动、齿条传动、螺旋传动等均可应用于手部结构,它们既可是双指型的, 也可是三指(或多指)型的;既可自动定心, 也可非自动定心;平面平行移动装置:都采用平行四边形的铰链机构—双曲柄铰链四连杆机构, 以实现手指平移。
(3)驱动结构
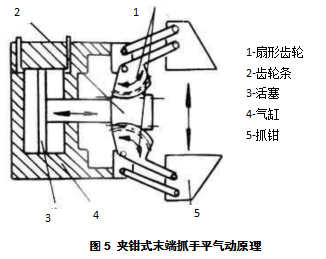
从驱动方式来说,又可以分为液压驱动、气压驱动及电力驱动3种。液压驱动,调速方便,但压力较大,系统成本高,维护较麻烦。气动驱动成本较低,产品型号丰富成为目前工业领域运用最广泛的末端执行器,但气源气压的不稳定输出会导致夹持力不够,使得工件易脱落。气动驱动手爪工作原理:气缸驱动活塞平移→齿条移动→扇形齿轮摆动→连杆机构摆动→手爪平动,如图5所示。电动执行器在性能和结构上均优于液压和气动末端执行器,是未来末端执行器行业的发展趋势。相比于气动末端执行器,其在系统结构上用电动驱动代替气动末端执行器的气源、过滤器、电磁阀等部分。相比于液压末端执行器,其系统维护方便,无需使用液压能源,可减小能源污染,一般通过电动控制,可精确调整角度和力度,实现复杂场景抓取,像三指夹爪,有7个自由度,灵活程度已经非常高了,相比传统刚性手掌,多自由度手掌的应用极大地提高了多指灵巧手的灵巧度和操控能力。
2、吸附式末端抓手
吸附式末端抓手吸靠附力取料,适用于大平面、易碎(玻璃、磁盘)微小的物体,因此使用面较广。根据吸附力的不同,可分为气吸附和磁吸附两种。气吸附式:气吸附式末端执行器是利用轻性塑胶或塑料制成的皮碗,通过抽空与物体接触平面密封型腔的空气而产生的负压真空吸力,来抓取和搬运物体。磁吸附式:磁吸附式末端执行器是利用磁铁或电磁铁,通电后产生的磁力来吸附工件的,其应用比较广泛,不会破坏被吸件表面质量。
3、电控伺服抓手
通过伺服控制系统,增强抓取过程的智能化,主要用于对质软,易变行等特殊工件或小批量多品种工件的抓取,它采用高度集成化一体式设计,结构紧凑, 由电驱动,实现爪指的收紧与放开,定位点位可控,夹持力可控;通过 PLC、工业PC机、单片机及运动控制器等上位机控制,实现对物件的抓取、 定位等功能,是设备的柔性执行终端。
宇邦工业此类产品主要有气动抓手和电控伺服抓手,气动抓手有二指和三指式系列产品,其外形紧凑,体积小,重量轻,安装方式多样可装载在其它装夹或气缸上使用。可以实现双向抓取,可自动对中,重复精度高。装载磁性开关可实现自动化的控制,抓取力矩恒定,以保证使用稳定,可适用特殊环境下使用。系列产品见图6。
4、国产末端抓手的典型案例
宇邦电控伺服抓通过手感知系统由内部传感器和外部传感器组成,其作用是获取机器人内部和外部环境信息,并把这些信息反馈给控制系统。内部状态传感器用于检测各个关节的位置速度等变量,为闭环伺服控制系统提供反馈信息。外部传感器一方面使机器人更准确地获取周围环境情况,另一方面也能起到误差矫正的作用。产品性能具有安全、精度高、夹紧力实时可控、柔性冲击保护工件、尺寸测量功能。它可以完全取代气动抓手,实现夹紧力可调,并且具有自锁功能,防止意外断电后的工件掉落。根据工况不一样,需要定期对末端伺服抓手进行除尘、检查电机的发热情况和检查是否有螺丝松动等。

{kind=link}